Welcome to use car_dreamer!
car_dreamer aims at facilitating the training and evaluation of reinforcement learning and world model algorithms in the highly realistic simulator CARLA.
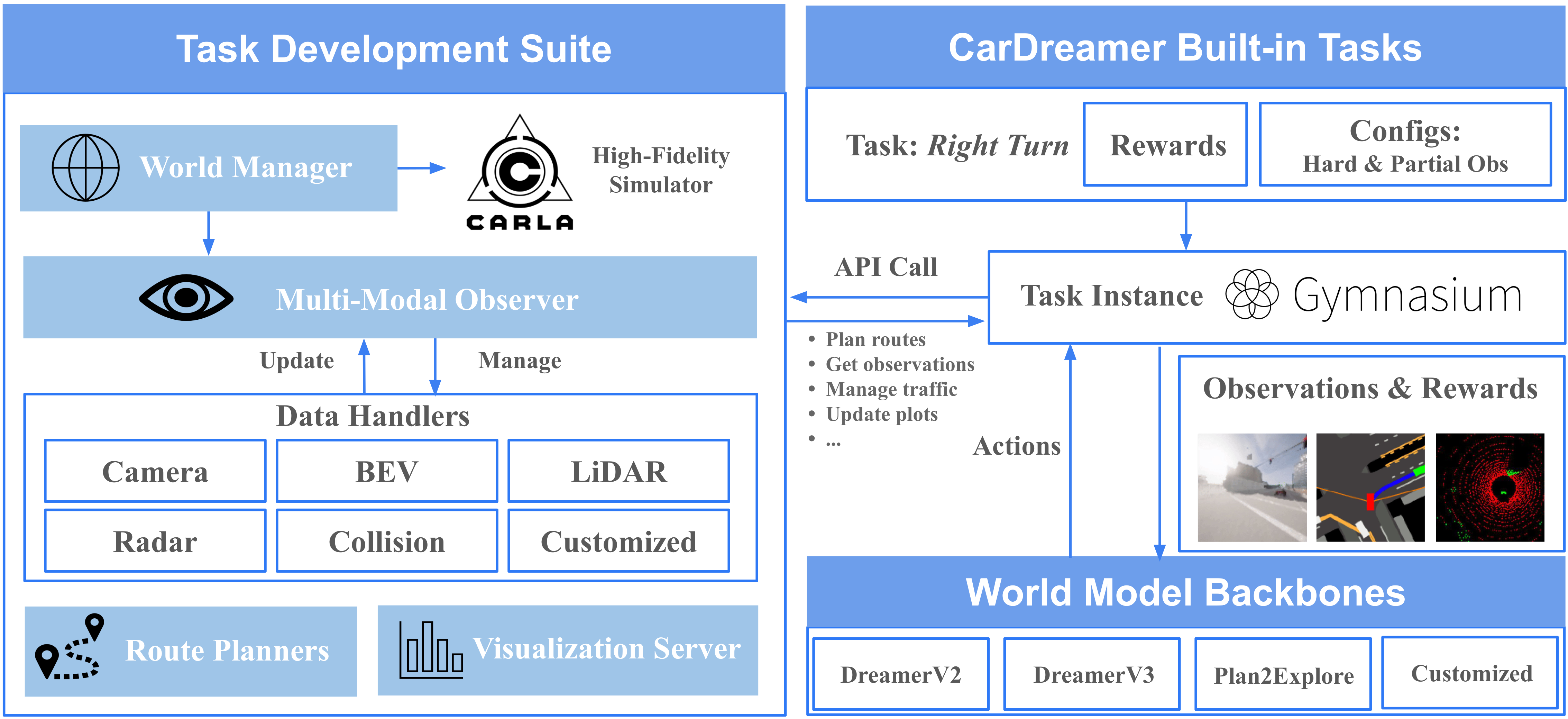
car_dreamer provides a collection of well-defined urban driving tasks. Each task encompasses a driving environment and a task goal. The tasks vary from a single skill such as lane following or left turning, to random roaming in mixed road conditions which may encounter crossroads, roundabouts, and stop signs. All the tasks support the Gym interface so that users can easily plug in their own algorithms.
Furthermore, car_dreamer includes a task development suite that simplifies the customization of driving tasks. It provides a number of API calls to minimize users’ efforts in spawning and managing the vehicles, planning routes, and obtaining diverse observation data for RL algorithms. A visualization server automatically grasps the observation data, displaying the videos and the statistics (e.g., terminal conditions, rewards, other information of user interest) through an HTTP server. This eases task and algorithm engineering and debugging.
Note
This document details the installation and customization of car_dreamer. For information regarding training and evaluation using specific RL and world model algorithms, please refer to CarDreamer and the arXiv paper.